Pointclouds are an up-and-coming approach for coding 3D scenes. Two means of creating such pointclouds are finding the same points in several regular images or using time-of-flight cameras (either based on a laser scanner or an infrared projector/camera pair). The recent generation of smartphones are capable of capturing pointclouds in real-time.
This allows them to capture pointclouds efficiently, which they can use for applications ranging from face recognition to the creation of 3D models.
But many applications require large numbers of pointclouds that must be sent to the Cloud for further processing. Among the endless possibilities brought by this is the creation of 3D models for entire houses, parks or cities (especially in combination with videos), which can be used in AR or VR applications. Also capturing the motion of a human body has applications, for example in medicine and training.
However, pointclouds are huge. Each pointcloud frame contains more data than a video frame, and the research for compressing pointclouds that change over time has just started.
Examples of current ideas are: convert to video-with-depth and use video compression, convert to meshes and simplify them, describe groups of points by their curvature and simplify that.
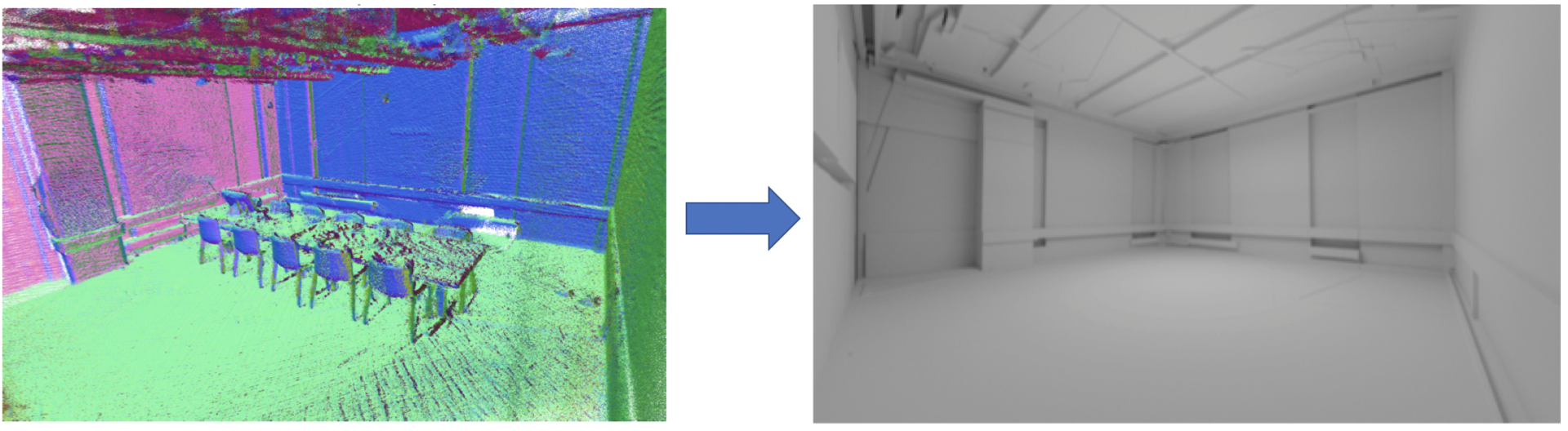
In this thesis, we want to explore something else: we want to segment the pointclouds into very basic geometric structures (boxes, balls, columns, pyramids etc), and describe the points as distances from these structures. The image at the top shows the result of our initial attempt that used only planes. This made it possible to convert a pointcloud into a 3D model consisting of just flat surfaces. With this thesis, we want to generalize this idea and compare how well this works compared to other techniques. We will use our tool PCC Arena to make those comparisons.
The topic opens for two or three theses, and it would be good to start working as a team.
- The team implements brute-force algorithms to find geometric structure in a pointcloud.
- One thesis uses this as a basis for the machine-learned detection of geometric structures.
- A second thesis uses this as a basis for efficient coding of point as distances from a simple geometric object in space.
- A third thesis works on the inter-frame coding using these geometric structures.
Learning outcome
- Learn about protocols for pointcloud transmission in the Internet and contribute tp a new one.
- Learn about various methods for pointcloud compression, and develop an entirely new approach. Learn how to compare compression methods using several metrics.
- Get a deep understanding of pointclouds. Understand parameter-fitting methods based on optimization algorithms such as RANSAC.
Requirements
-
Only suited for full-time students
-
Work in the lab at IFI
-
completed IN2140 or equivalent
-
completed IN3230 or take IN4230
-
take IN5060
-
a course related to optimization (including IN3050) is desirable but not mandatory