REGENRAP: Repertoire Generation for Robotic Applications
(completed)
How can automatic design of behavior repertoires be useful in robotic applications? And how can these repertoires be generated in an efficient way?
Example repertoire of different behaviors for a robotic swarm.
About the project
The project investigates how to efficiently make use of a new type of algorithms, called quality-diversity algorithms, for robotic applications. We aim to both improve the algorithms in the context of automatic design of robotic behaviors and shapes, as well as applying the algorithms to real-world swarm robotics.
Sub-projects
Enhancing MAP-Elites to overcome challenges in Evolutionary Robotics
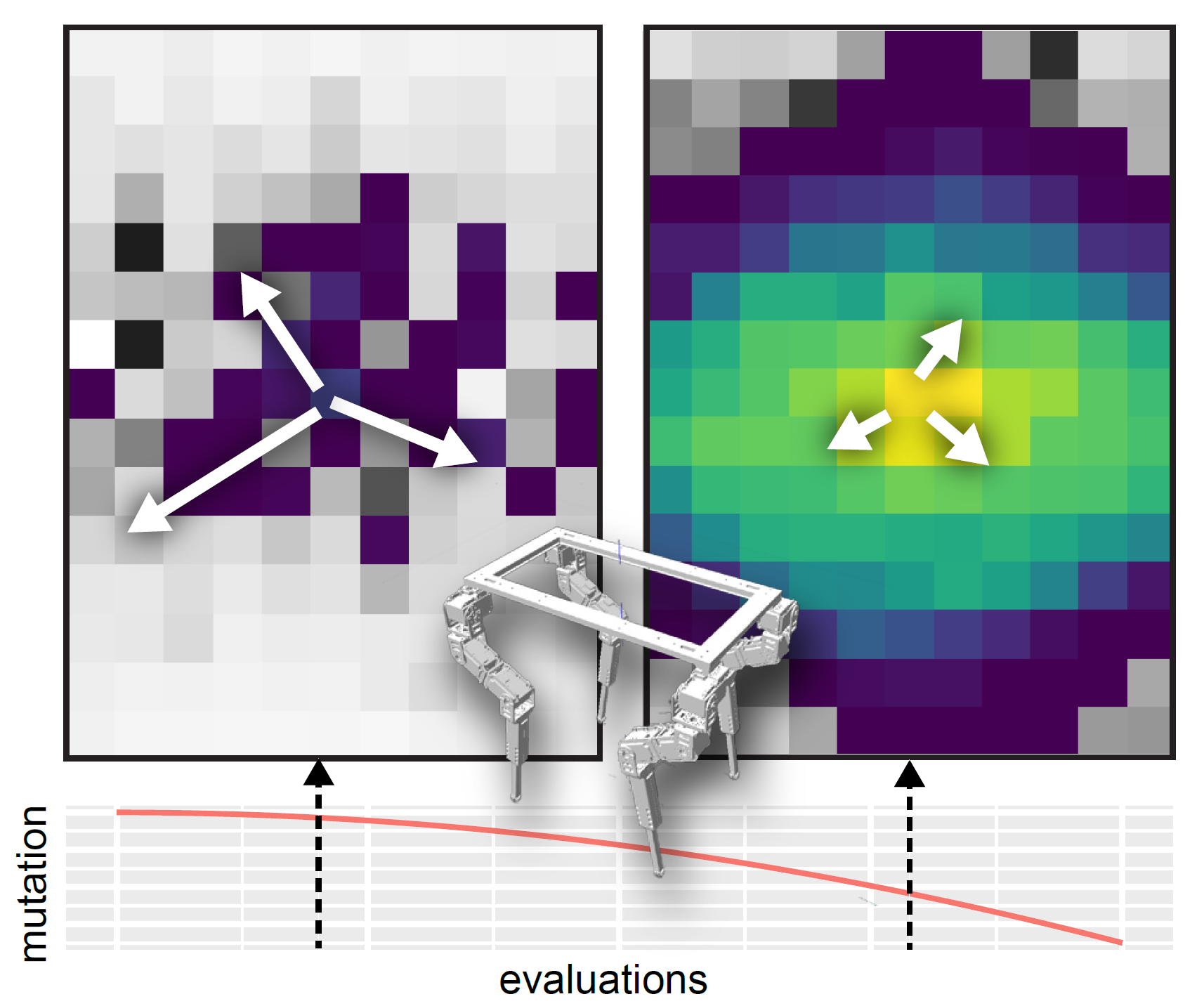 The goal of this project is to explore how diversity-promoting optimization algorithms can be used to overcome some of the fundamental challenges in robotics. By combining existing techniques from the field with an innovative optimization algorithm - called MAP-Elites, this project generates new insight into the optimization process. Through optimizing the control system of a quadruped robot as well as evolving modular robots, the result of this project shows that a diversity of solutions could hold the key to overcoming some of the fundamental challenges in the field of Evolutionary Robotics.
The goal of this project is to explore how diversity-promoting optimization algorithms can be used to overcome some of the fundamental challenges in robotics. By combining existing techniques from the field with an innovative optimization algorithm - called MAP-Elites, this project generates new insight into the optimization process. Through optimizing the control system of a quadruped robot as well as evolving modular robots, the result of this project shows that a diversity of solutions could hold the key to overcoming some of the fundamental challenges in the field of Evolutionary Robotics.
Concurrent multi-tasking drone swarms through quality-diversity methods and COTS hardware.
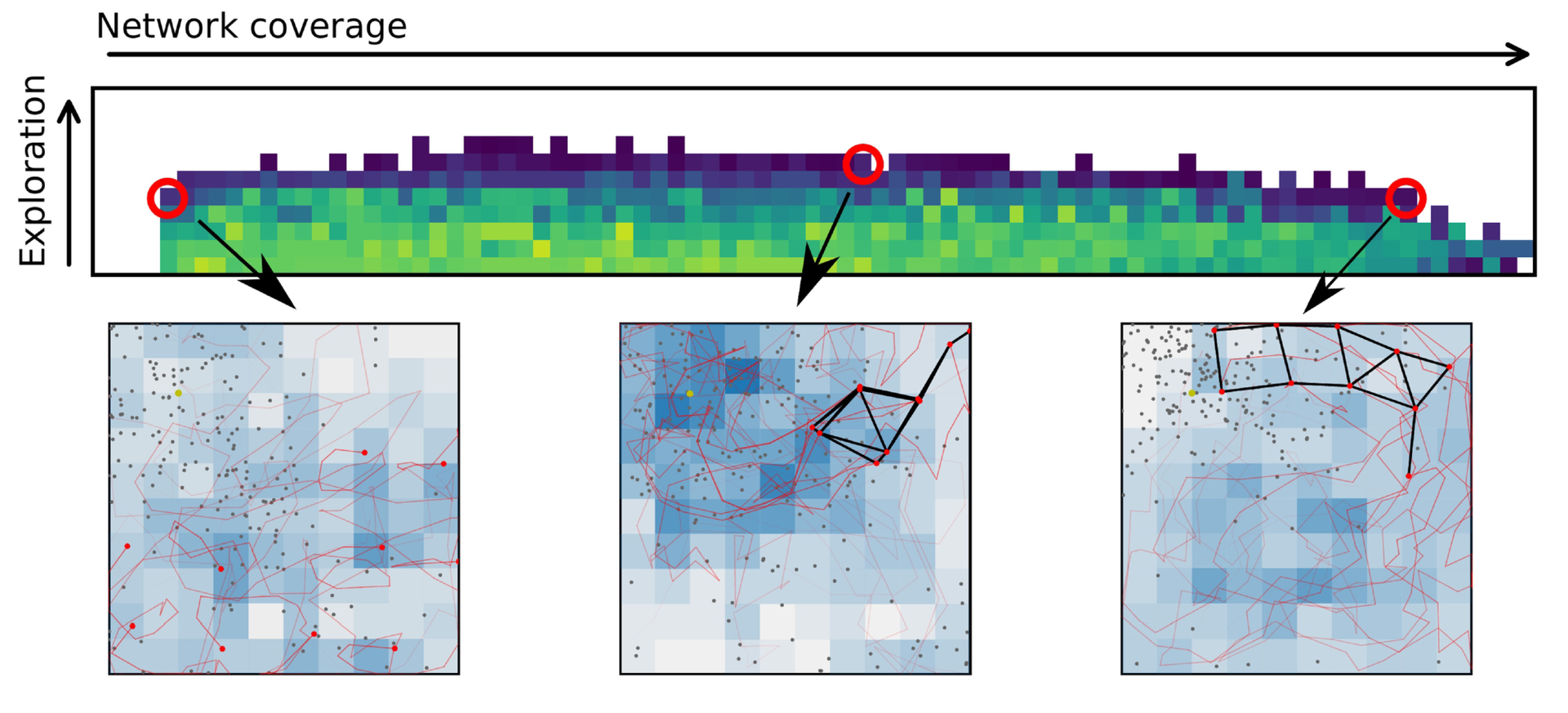
Swarms of drones may greatly simplify tasks such as search-and-rescue, disaster relief, perimeter surveillance or even logistics. Using many small and simple agents that collaborate makes it possible to tackle tasks that are too big or complex for a single agent. This project presents a concept for a multi-function drone swarm - a swarm that can solve multiple tasks concurrently. Three tasks for drone swarms are explored: creating a communication network, exploring an area, and geolocating radio frequency emitters. Developing a multi-function swarm reduces the number of agents required, compared to operating three independent swarms each with a single task.
Through evolutionary optimization it is possible to automate behavior generation to generate a large repertoire of swarm behaviors. The repertoire of behaviors allows the operator to adapt the behavior in real-time to better suit their preferences. Part of the challenge of finding good swarm behaviors for a multi-function swarm is that tasks may conflict. For example, agents moving around a lot improve exploration, while agents standing still may provide a better, more stable network. This project demonstrates the viability of a real-world multi-function drone swarm capable of solving multiple tasks at once and change behavior on the fly.
Selected publications
“A Framework for Automatic Behavior Generation in Multi-Function Swarms”
by Sondre A. Engebraaten, Jonas Moen, Oleg A. Yakimenko, and Kyrre Glette.
Frontiers in Robotics and AI, vol. 7, 2020, Frontiers. Details.
“MAP-Elites enables Powerful Stepping Stones and Diversity for Modular Robotics”
by Jørgen Nordmoen, Frank Veenstra, Kai Olav Ellefsen, and Kyrre Glette.
Frontiers in Robotics and AI, vol. 8, 2021, Frontiers. Details.
“On Restricting Real-Valued Genotypes in Evolutionary Algorithms”
by Jørgen Nordmoen, Tønnes F. Nygaard, Eivind Samuelsen, and Kyrre Glette.
In Applications of Evolutionary Computation. EvoApplications 2021, vol. 12694 of Lecture Notes in Computer Science, 2021, pp. 3-16. Details. Download: PDF.
“Evolved Embodied Phase Coordination Enables Robust Quadruped Robot Locomotion”
by Jørgen Nordmoen, Tønnes F. Nygaard, Kai Olav Ellefsen, and Kyrre Glette.
In Proceedings of the Genetic and Evolutionary Computation Conference, 2019, pp. 133-141.
Details. Download: PDF.
“Dynamic mutation in MAP-Elites for robotic repertoire generation”
by Jørgen Nordmoen, Eivind Samuelsen, Kai Olav Ellefsen, and Kyrre Glette.
In The 2018 Conference on Artificial Life: A Hybrid of the European Conference on Artificial Life (ECAL) and the International Conference on the Synthesis and Simulation of Living Systems (ALIFE), no. 2018, pp. 598-605. Details. Download: PDF.
“Towards a Multi-Function Swarm That Adapts to User Preferences”
by Sondre Engebråten, Oleg Yakimenko, Jonas Moen, and Kyrre Glette.
In Swarms: From Biology to Robotics and Back, ICRA 2018 Workshop, 2018. Details. Download: PDF.
“Evolving a Repertoire of Controllers for a Multi-function Swarm”
by Sondre A. Engebråten, Jonas Moen, Oleg Yakimenko, and Kyrre Glette.
In Applications of Evolutionary Computation - 21st International Conference, EvoApplications 2018, vol. 10784 of Lecture Notes in Computer Science, 2018, pp. 734-749. Details. Download: PDF.
“Combining MAP-Elites and Incremental Evolution to Generate Gaits for a Mammalian Quadruped Robot”
by Jørgen Nordmoen, Kai Olav Ellefsen, and Kyrre Glette.
In Applications of Evolutionary Computation - 21st International Conference, EvoApplications 2018, vol. 10784 of Lecture Notes in Computer Science, 2018, pp. 719-733. Details. Download: PDF.
“Networking-Enabling Enhancement for a Swarm of COTS Drones”
by Sondre Engebråten, Kyrre Glette, and Oleg Yakimenko.
In 2018 IEEE 14th International Conference on Control and Automation (ICCA), 2018, pp. 562-569. Details. Download: PDF.
“Field-Testing of High-Level Decentralized Controllers for a Multi-Function Drone Swarm”
by Sondre Engebråten, Kyrre Glette, and Oleg Yakimenko.
In 2018 IEEE 14th International Conference on Control and Automation (ICCA), 2018, pp. 379-386.
Details. Download: PDF.
“Meta-Heuristics for Improved RF Emitter Localization”
by Sondre A. Engebråten, Jonas Moen, and Kyrre Glette.
In Applications of Evolutionary Computation - 20th European Conference, EvoApplications 2017, vol. 10200 of Lecture Notes in Computer Science, 2017, pp. 207-223. Details. Download: PDF.
Published Jan. 26, 2022 4:15 PM
- Last modified Jan. 29, 2022 12:36 AM