Nettsider med emneord «Robotics»
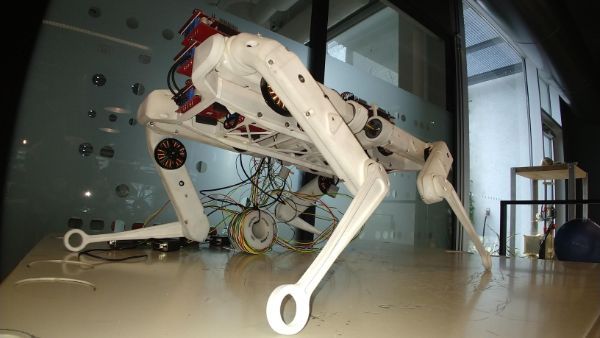
Ishiguro-Kano lab presentation on bio-robotics work
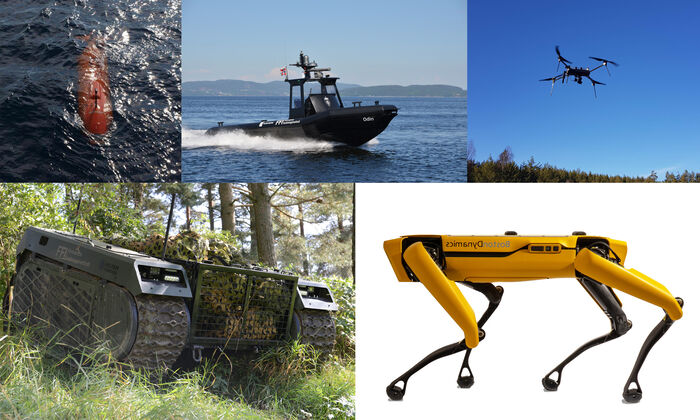
Oppgaven utføres i samarbeid med Forsvarets forskningsinstitutt (FFI) på Kjeller.

The overall goal of this project is to leverage the flexibility of FPGA architecture to test algorithms and control multiple motors in robotic systems.



The Tactile Internet –a communication network that is capable of delivering real-time control, touch, and sensing/actuation information through sufficiently reliable, responsive, and intelligent connectivity – is revolutionizing the understanding of what is possible through wireless communication systems, pushing boundaries of Internet-based applications to remote physical interaction. Such remote interaction capability can be used in surgery, driving, drone-based transportation, immersive education, and adventure, etc. Although the community envisions the bright future of the tactile internet, few works implement the physical platform and specify the blockages in enabling a smooth quality of experience (QoE) during the interaction. In this project, the candidate(s) will work in a team to identify those blockages and propose the novel algorithm in network stack to enable the avatar in the real world.
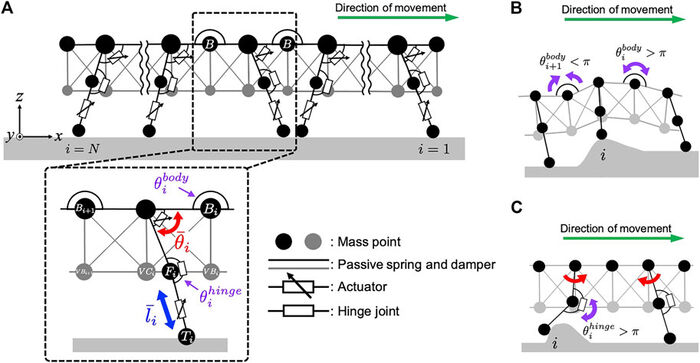
What is the best way for a robot to tackle challenging surfaces? Prediction? Sensor data? AI processing? Parallell computing?
In the field of robotics, creating grippers that can perform tasks similar to the capabilities of a human hand, is still a challenge yet to be solved.

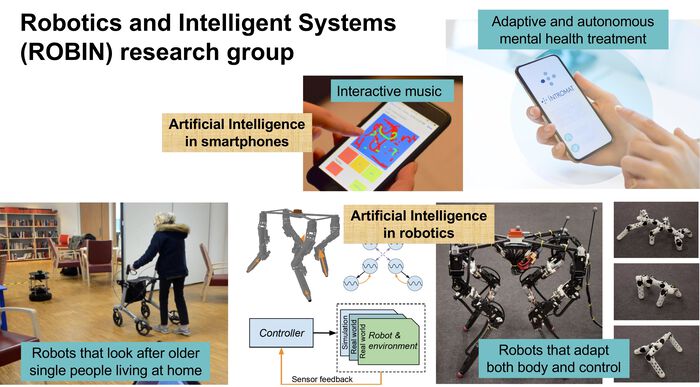
Our goal is to contribute to the development of ever more intelligent systems. This can be systems that in specific tasks or environments can assist or replace human judgment, or it can be systems that can accomplish tasks we would like to automate.



